出行洞察:仿真软件在自动驾驶上的应用
01
自动驾驶仿真测试基本定义
定义:无需实车直接通过仿真软件将自动驾驶的应用场景进行数字化还原,建立尽可能多的真实世界系统模型,进行测试验证。
虚拟仿真测试的优势:
1) 汽车研发、制造、验证测试等环节不可或缺的技术手段,能有效缩短技术和产品开发周期,降低研发成本;
2) 是实现高阶自动驾驶落地应用的关键一环,具备自动驾驶功能的车辆必须经过大量的虚拟仿真测试以及实车路测之后才能商用化。
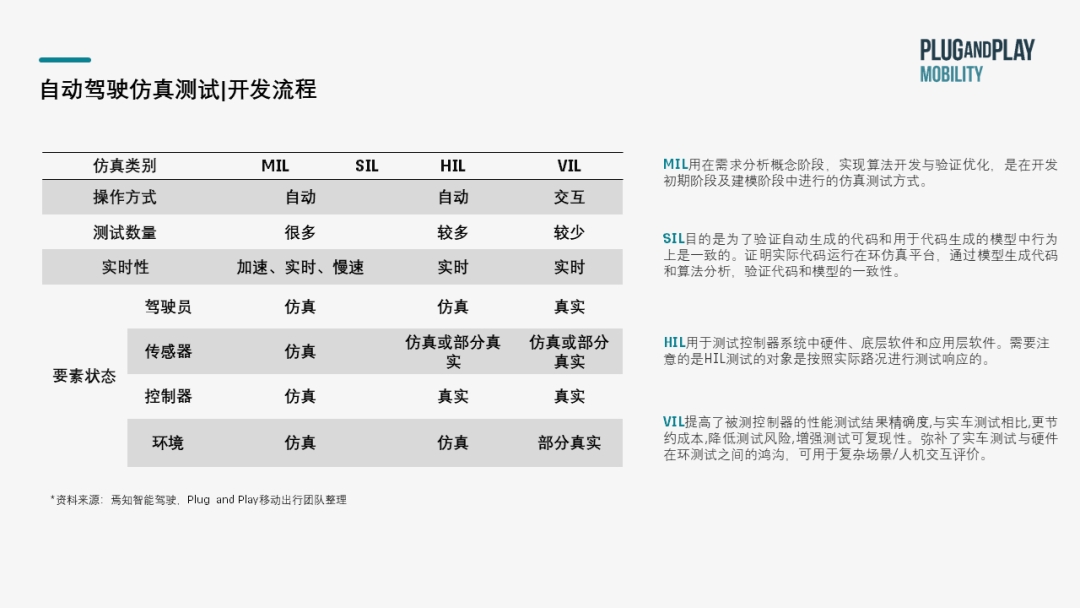
自动驾驶商业化的三个阶段包括:虚拟仿真测试—封闭场地测试—开放道路测试,车企的自动驾驶开发的流程也是V字形,从产品设计验证,MIL-SIL-HIL-VIL到开发验证、测试验证、体验评价全过程。
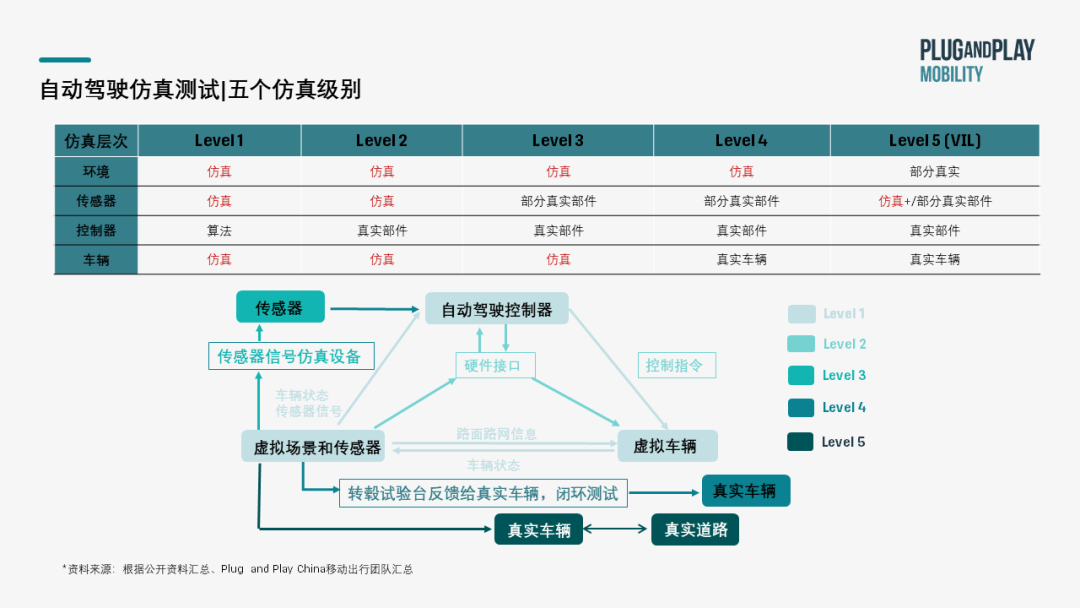
自动驾驶仿真测试可以根据环境、传感器、控制器、车辆四种元素的状态可以分为五大仿真级别,级别越高,包含的真实元素越多。
1) Level 1 的仿真测试基本是完全基于电脑来进行算法的验证。
2) Level 2加入了传感器信号设备,将场景仿真软件和车辆动力学软件在实时仿真机运行,用来保证运行的实时性。
3) Level 3 与Level2相比,部分传感器使用真实部件。
4) Level 4场景仿真和车辆动力学仿真软件联合仿真,以真实车辆反馈的轮速、车轮转角等作为输入,输出行驶阻力和转向阻力,通过转毂试验台反馈给真实车辆,实现闭环测试。这其中的难点在于行驶阻力和转向阻力模拟的真实性。
5) Level 5的仿真测试,不再将真实车辆置于转鼓试验台上,而是使用真实车辆在真实的道路上行驶,故一般也称为车辆在环测试VIL。主机厂可以从level1-5可以根据不同需求选择不同级别仿真测试,评估系统的安全与准确性。
普通场景下的自动驾驶仿真算法已经比较完善,突破难点在于一些极端场景(corner cases)。由于极端场景在现实中可遇不可求,利用仿真平台可以便捷生成,所以业界共识是加大仿真测试在自动驾驶测试中的占比。而且测试场景配置灵活,可以提升测试效率降低测试成本。
仿真测试、封闭场地测试、开放道路测试三者之间互相补充,形成测试闭环,共同促进自动驾驶车辆的研发和标准体系建立。
1) 仿真测试结果可以在封闭场地和开放道路进行测试验证;
2) 通过道路测试得出的危险场景,将会反馈到仿真测试中,便可有针对性的去调整设定场景和参数空间;
3) 仿真测试和封闭场地测试的最终结果要进行综合评价,基于评价结果不断地去完善评价准则和测试场景库。
02
自动驾驶仿真的应用构成
// 第一类应用构成——场景库
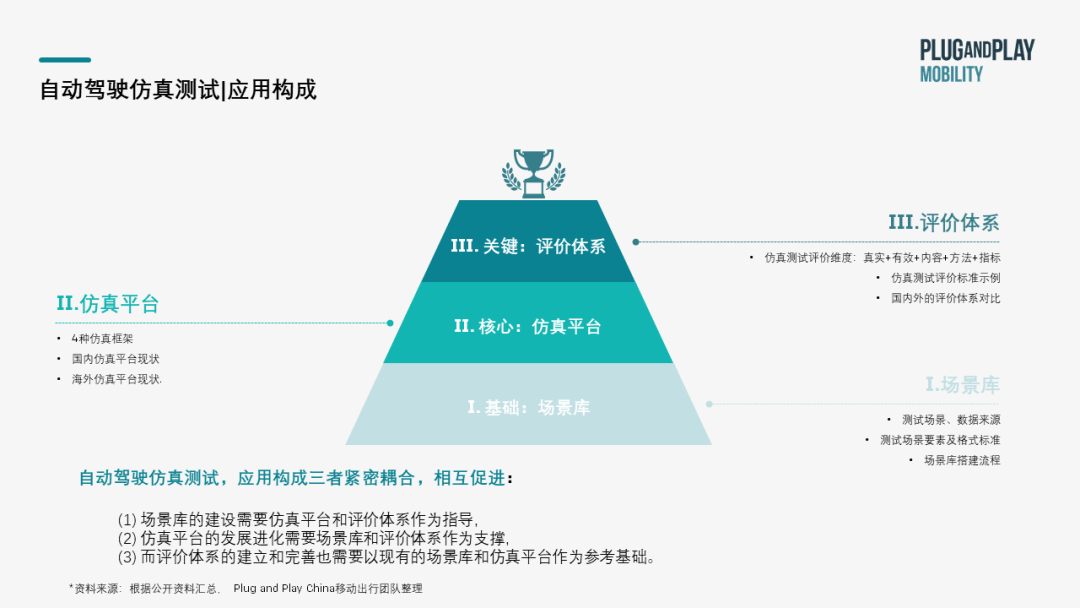
应用构成分成3类,场景库作为基础,场景库的建设需要仿真平台和评价体系作为指导;仿真平台作为核心,发展进化需要场景库和评价体系作为支撑;评价体系是关键,建立和完善也需要以现有的场景库和仿真平台作为参考基础。三者紧密耦合相互促进的。
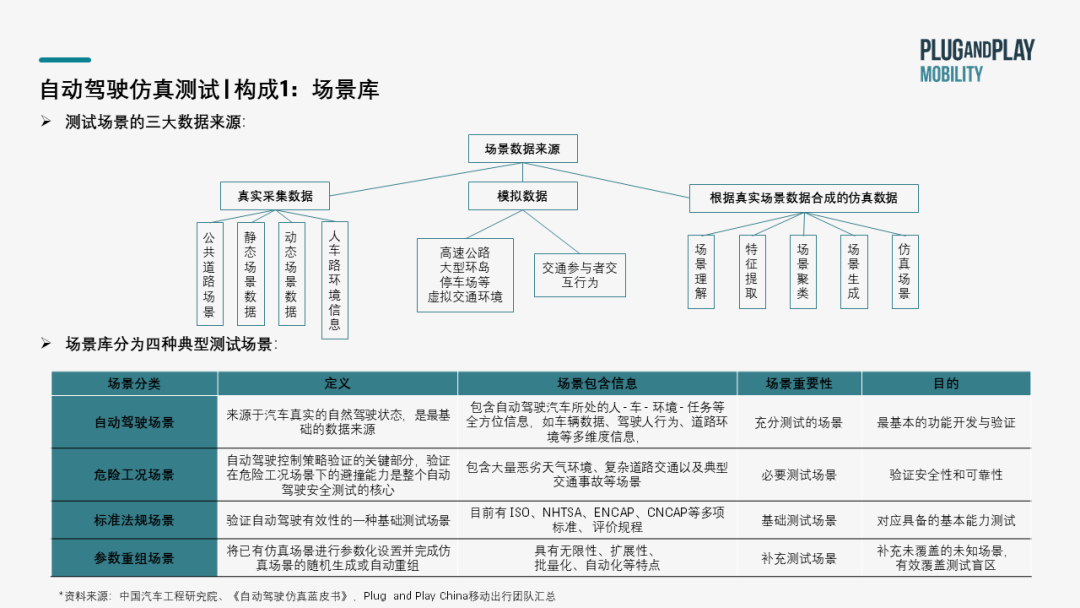
测试场景的数据来源主要包括三大部分:真实数据、模拟数据以及根据真实场景数据合成的仿真数据;此外,场景库的4种典型测试场景:自然驾驶场景、危险工况场景、标准法规场景、参数重组场景。几乎包含了所有的场景情况。
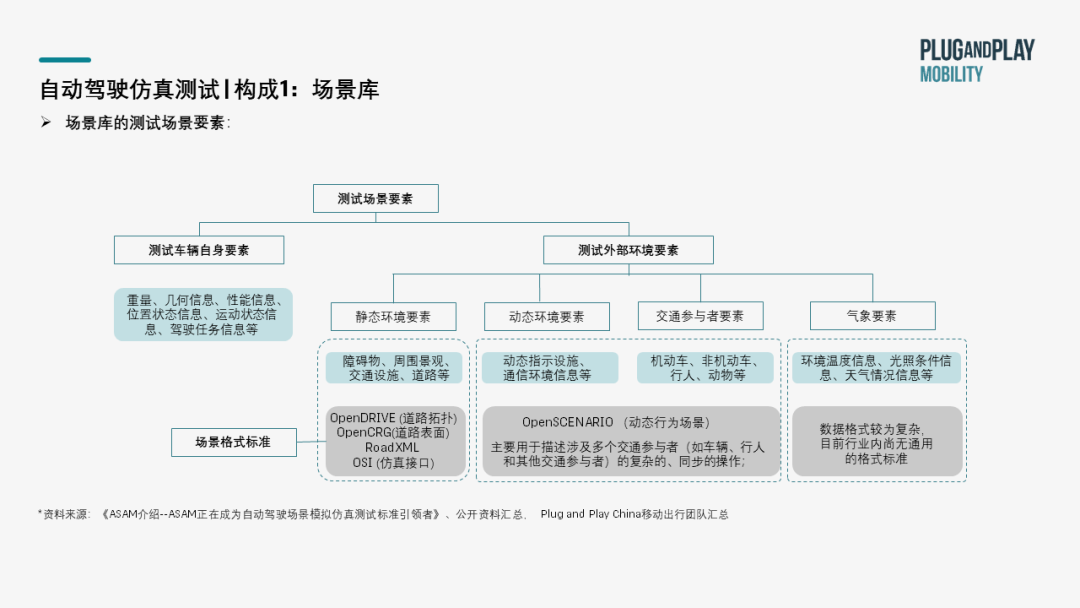
场景是自动驾驶汽车与其行驶环境各组成要素在一段时间内的总体动态描述,具有无限丰富、极其复杂、难以预测、不可穷尽等特点。测试场景库的搭建,能有效驱动自动驾驶的研发测试工作,自动驾驶的研发测试反过来也能够场景库提供反馈意见,丰富场景库,从而形成闭环。
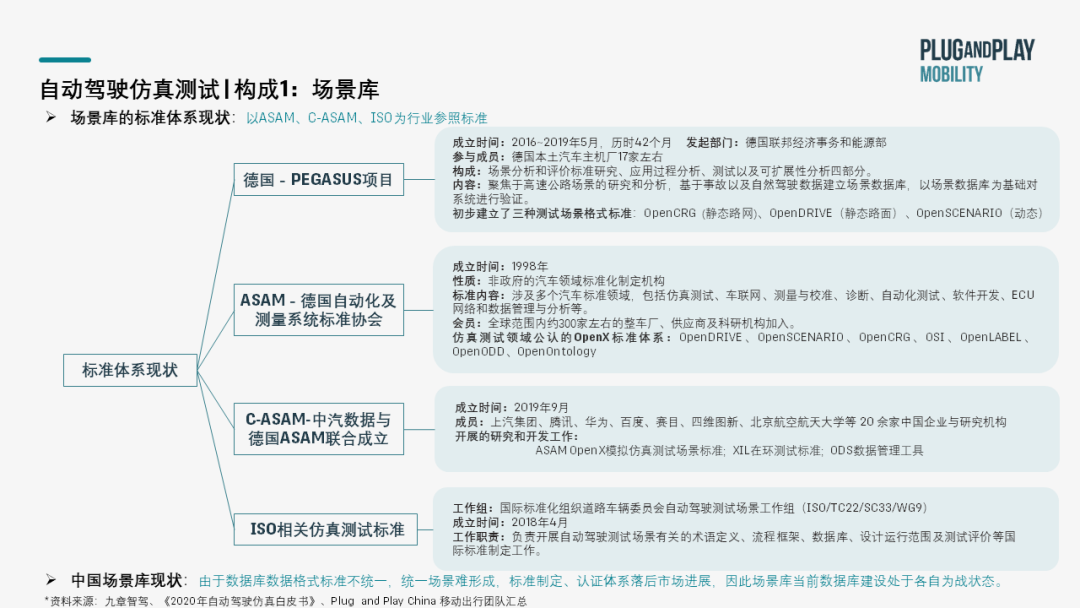
场景库的标准体系是以德国ASAM,中汽数据与德国ASAM联合成立的C-ASAM,还有ISO为行业的参照标准。ASAM最有权威的,全球范围内300家左右的整车厂、供应商和科研机构都是协会成员,建立了仿真测试领域公认的OpenX标准体系。中国场景库现状是由于数据库数据格式标准不统一,统一场景难形成,标准制定、认证体系落后市场进展,因此场景库当前数据库建设处于各自为战状态。
// 第二类应用构成——仿真平台
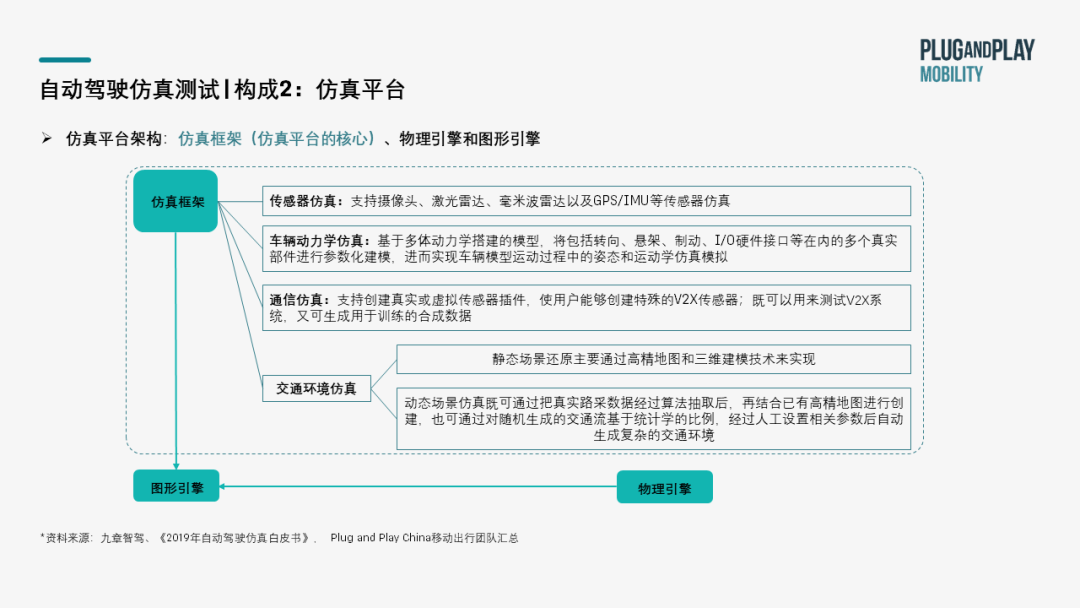
仿真平台一般包括仿真框架、物理引擎和图形引擎。仿真框架是平台软件平台的核心,支持传感器仿真、车辆动力学仿真、通信仿真、交通环境仿真等。
涵盖所有这些模块的自动驾驶仿真平台,主要验证在架构的稳定性和性能方面:
通过仿真环境,结合部分硬件系统的计算结果进行测试,可以使软件和硬件的兼容性和功能完整性得以验证,用较低的成本测量验证子系统模块功能安全性,局部子系统的全方位测试验证,可以方便有针对性的达到系统辨识和错误追踪定位的目的。
真平台为算法公司提供了算法快速迭代的纯软件接口方案,也提供软硬件结合的系统解决方案。
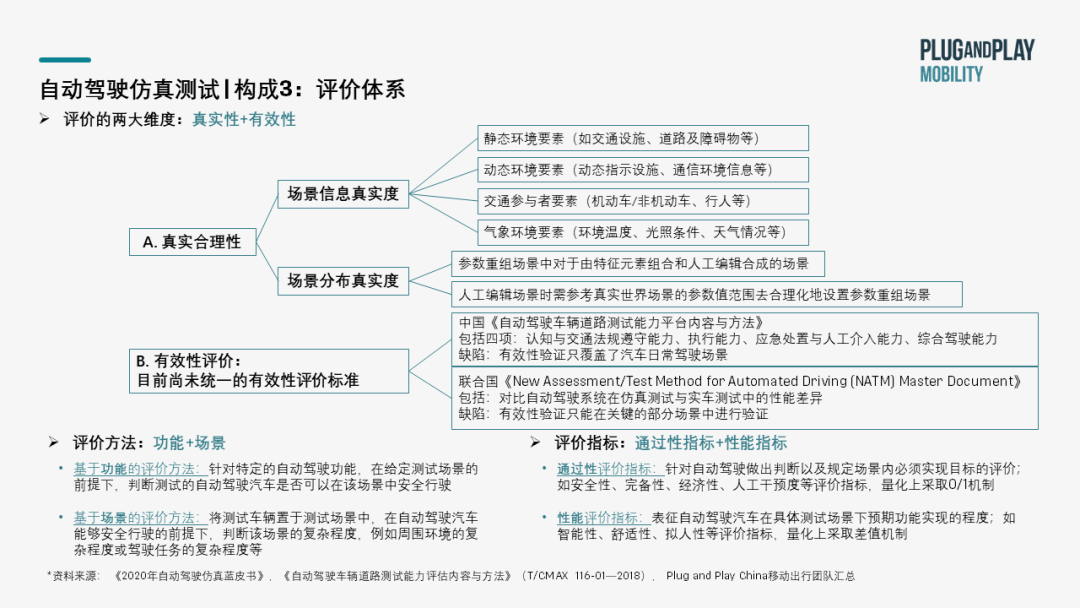
// 第三类应用构成——评价体系
仿真测试的评价体系。两个重要的评价维度:真实性和有效性。真实性评价:主要是针对场景库真实合理性的评价,分为场景信息真实度、场景分布真实度两个方面。第二个维度,目前尚未统一的有效性评价标准,当前可参考的标准国内外只有这两种,都各自有缺陷。中国《自动驾驶车辆道路测试能力平台内容与方法》是只覆盖了汽车日常驾驶场景,联合国这个NATM Master Document是只能在关键的部分场景中进行验证。
03
市场及产业链分布
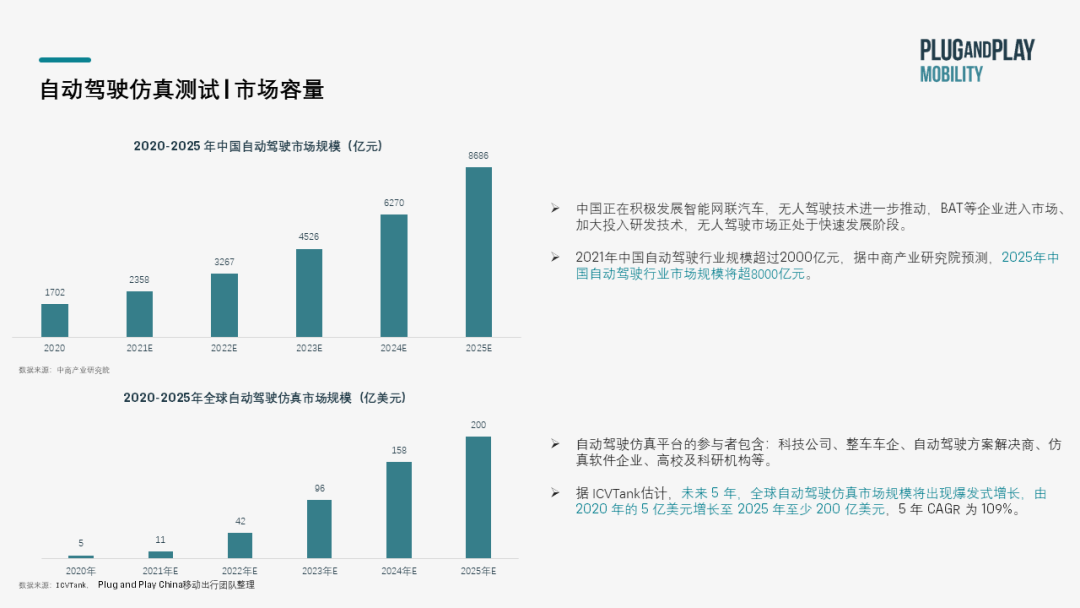
// 市场容量
自动驾驶仿真测试已经被行业广泛接受,由于自动驾驶测试车辆数量较少,自动驾驶仿真测试平台能很好地补足传统实地路测的缺陷,使得自动驾驶仿真平台成为实现高级别自动驾驶的刚需。2025年中国自动驾驶市场规模就将超过8000亿元,自动驾驶仿真平台的参与者包含:科技公司、整车车企、自动驾驶方案解决商、仿真软件企业、高校及科研机构等。预计到2025年自动驾驶仿真市场规模达到至少200亿美元。
// 自动驾驶产业链图谱
互联网仿真平台:
在仿真方面起步相对较晚,在汽车功能探索方面经验较少,但是具备大数据优势,软件开发能力强。自动驾驶汽车相比传统汽车,对软件的需求更大,科技公司进行仿真软件的探索,目的是进入市场庞大的汽车行业,建立更大的数据平台,形成新的业务增长点。
自动驾驶解决方案商:
主要针对自身需求研发定制化仿真软件,较少对外提供仿真服务,但借助于充足的资金、丰富的道路实测数据支持,自身研发驱动力,在自动驾驶仿真方面具有很强的竞争力。
传统公司&初创公司仿真平台:
传统仿真软件企业由于技术积累比较深厚,进入自动驾驶仿真具有先天优势,而且合作伙伴较多,二次开发具有优势。
初创企业由于起步晚,技术积累较弱,国内企业和国外的差距较大,但依靠雄厚的资金和人才集聚力,有望迅速崛起。在全球主流自动驾驶仿真软件企业中,美国和德国占据全球企业总数一半以上。德国和美国在传统仿真软件领域的坚实基础促进了自动驾驶仿真的发展处于世界领先地位。中国目前仅有 3 家Startup,在汽车传统仿真领域存在短板,自动驾驶仿真方面积累薄弱,创新性不足。

04
国内外标杆企业竞争对比分析
// 国内外重点项目创新点及竞争点对比
全球范围内各家初创公司的在仿真模块的技术差距并不是特别明显,主要的差距核心还是在于场景库数据的构建和仿真测试软件应用与评价测试体系的积累。

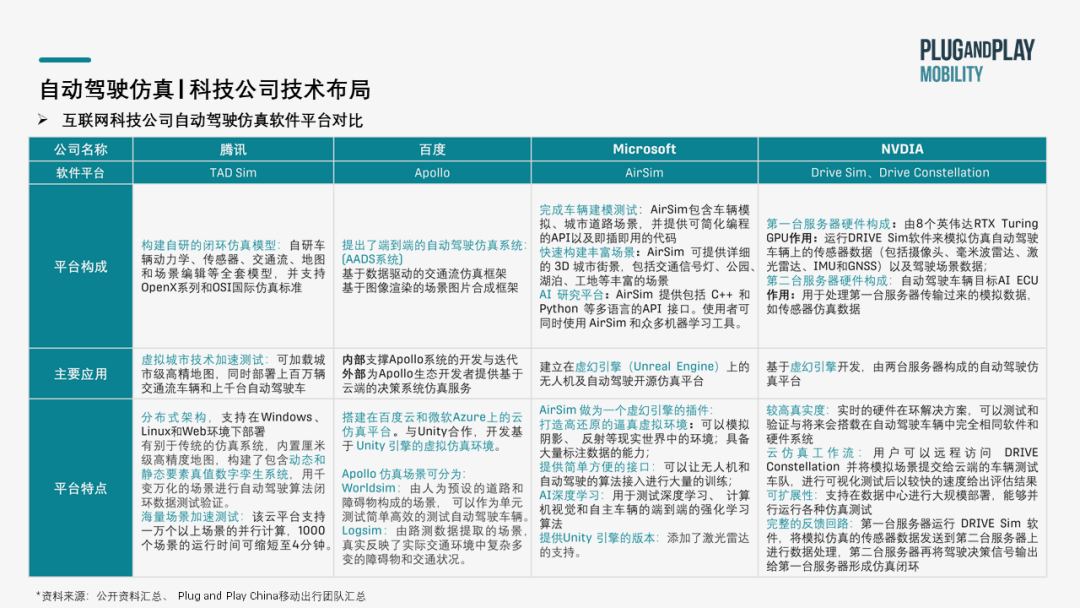
// 互联网科技公司自动驾驶仿真软件平台对比
05
痛点和解决方案
// 置信度问题与解决方案
目前在置信度方面主要面临三个问题:
仿真软件本身:
a. 仿真模型大多都是建立在理想条件的情况下,仿真模拟器模拟出来的结果的置信度,还没有具体可量化的指标去评价;
b. 若是考虑到传感器硬件或软件自身造成雷达的噪点问题,以及雨雪、水渍、灰尘等这些干扰雷达工作性能的环境因素,导致雷达性能减弱无法使用或者现实回波信号误差难模拟的现象。这些问题或现象更是激光雷达仿真模拟的难题。
仿真平台复现和泛化的虚拟场景:
a. 目前通常采用的手段是,基于真实数据通过仿真模拟器去复现和泛化出更多的虚拟仿真测试场景;
b. 真实场景的泛化主要存在两大问题:
1) 泛化的方向不确定是否符合统计学意义与测试需求;
2) 泛化过程中复杂密集交通流真实性损失。
c. 因此,复现和泛化出来的虚拟仿真环境与真实环境之间必然存在差异,这种差异会对测试结果造成多大的影响,测试场景与真实场景的拟合度水平是如何?是否在可接受的范围内?目前没有可量化的指标评价。
测试结果评价标准:
a. 目前传统的测试手段还是以硬件测试(包括HIL硬件在环、VIL车辆在环)或真实道路测试为主;
b. 参数无法确定是否标定好,真实结果也很难预测,所以试验-仿真-试验的回路不通;
c. 实际上验证出来的数据不是特别可靠,因此真实性没有保证。
解决方案:
1) 腾讯自动驾驶仿真平台TAD-Sim采用游戏渲染+真实数据双擎驱动的方式,通过利用大量真实路采数据训练交通流AI模型,再结合游戏渲染引擎技术,自动构建互动性较强,贴近真实世界的测试场景。
2) 百度采用增强现实的自动驾驶仿真系统-AADS,通过使用车辆搭载的激光雷达和高清相机扫描街景,获取车辆周围静态的场景图像和车流移动的动态轨迹数据;利用这些素材,系统再应用增强现实技术直接、自动地创建高逼真度的仿真图像,使得创建出的虚拟场景更加接近真实场景。
3) 51 WORLD采用数字孪生测试技术来增加仿真测试结果的置信度,实车在真实场景测试的过程中,会以车辆在环方式将车辆实时状态数据实时映射到虚拟场景中,同时虚拟场景的测试数据和评价结果也会反馈给现实世界,作为指导和优化现实世界中真实车辆进行决策的重要依据。
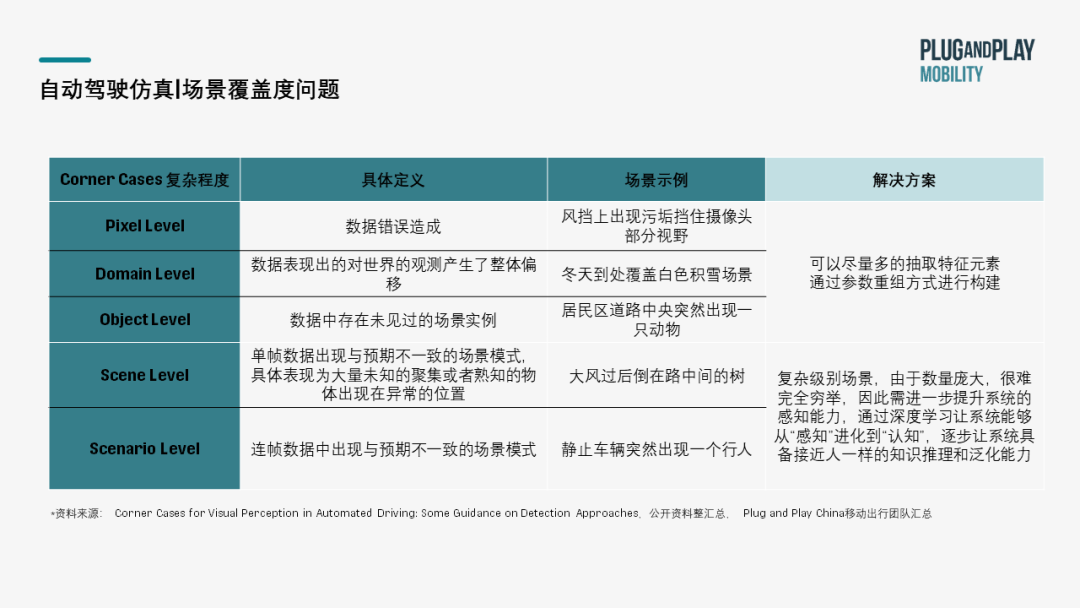
// 场景覆盖度问题
Corner Case难以全覆盖:对自动驾驶仿真测试来讲,最大的挑战在于去收集到所有Corner Case,来覆盖不同的道路环境、天气环境以及交通状况。
Corner Case地域特征不同:
1) “Corner Case”的地域性特征主要表现在测试场景在不同国家和地区存在较大的不同。因为各个国家的道路环境、交通习惯、交通规则以及驾驶习惯都可能存在较大的差异;
2) 地域性差异点:道路环境、交通状况、交通规则 、驾驶习惯等。
解决方案:
通过所在地区的测试场景评价考核,保证它能够应对所在地区所有的极端工况场景。因为本土仿真企业有“近水楼台”先发优势,更容易设计开发出适合本国道路环境及交通法规、驾驶习惯等场景的仿真测试软件。
06
总结
自动驾驶仿真平台的参与者包含科技公司、整车车企、自动驾驶方案解决商、仿真软件企业、高校及科研机构等。随着行业的发展,技术壁垒会愈发明显。传统仿真巨头和互联网科技公司为了弥补自身在汽车自动驾驶仿真领域的短板,也在不断的收并购相关的初创企业,以扩展自己的业务领域,进而构建自身闭环的仿真平台;
对于初创公司来说,更应该根据自身的技术优势在仿真领域选择一块适合自己的细分领域去深耕,做“大平台”下面的一个不可或缺的“软件”技术;而机器学习作为公认解决自动驾驶长尾问题的一种有效工具,不断打磨、完善技术模型,才是发展自动驾驶仿真赛道的长久之计。

加入璞跃中国
科技创新生态
添加微信小助手 pnp_china
加入创新者社群
及时掌握最新资讯
